Download as pdf
Grenoble, 07/10/2024
B-CRATOS – Press release
B-CRATOS integration of cutting-edge wireless technologies
|
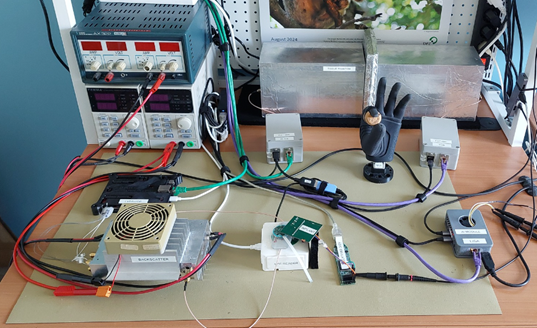
Figure 1: The B-CRATOS Integration Bench test setup at BRME
|
Following several months of intense work, B-CRATOS reached a significant stage for the development of the whole project: the complete wireless closed-loop system on bench. Through the advancement and integration of cutting-edge wireless technologies ̶ the low-power RF Backscatter technology and the FAT-IBC technology ̶ closed-loop functionality was successfully verified in a bench test setting.
Main features & objectives
The features of this integrated system, aimed at demonstrating this closed-loop, are twofold: on the one hand, the system captures neural data from cortical regions to control movement, on the other hand, it delivers movement-related sensory feedback to appropriate cortical regions of the brain through direct electrical stimulation.
The key objectives of this B-CRATOS stage are equally wide-ranging. Besides wanting to demonstrate the closed-loop control, here the system integration evaluated performance by measuring latency and data loss.
Regarding latency, the goal is to understand the time it takes for the information to travel from the sensors to the prosthetic and back. Both trips should take less than 100 milliseconds (ms). As for data loss, it is currently measured by counting how many data packets do not arrive properly.
The automatic closed-loop control explained
In the B-CRATOS bench test system, we simulate closed-loop sensorimotor control on the bench. Test data in a neural format, captured by the implantable device, is sent via wireless off-body backscatter and in-body Fat-IBC system to the AI decoder, which processes the data and triggers movement of the prosthetic.
During movement, sensors embedded in the prosthetic hand provide sensory feedback (proprioceptive relating to touch), which is detected by the AI module. A stimulation control command is then returned via wireless pathway to the implantable device.
In this test, when the feedback command is received by the implantable device, the test data is updated to a new pattern, and the loop repeats, demonstrating the continuous function of the full closed-loop system. In a real-life setting, the stimulation would provide the user with feedback relating to the movement and result in a change in subsequent neural motor outputs.
|
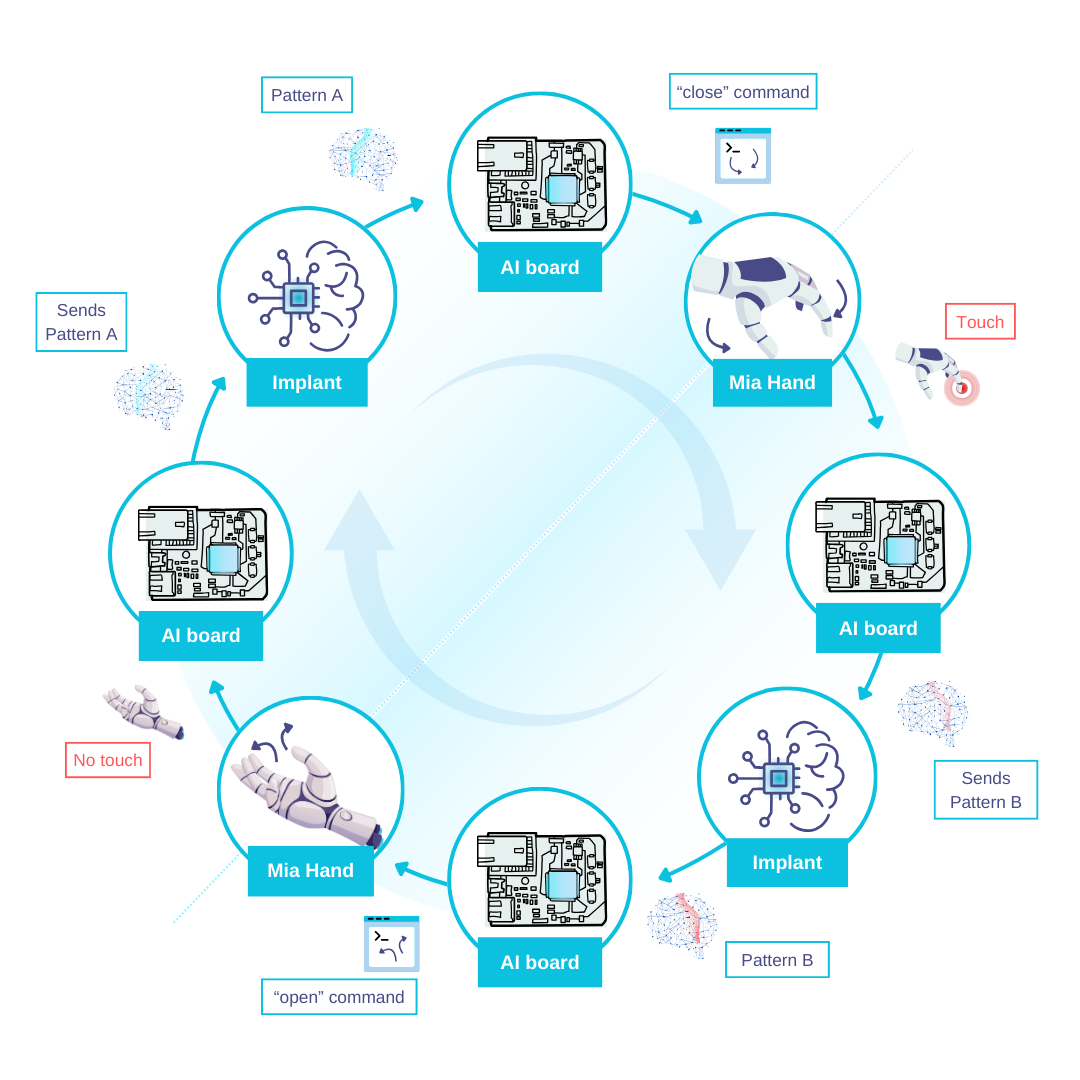
Figure 2: The closed-loop data flow for the test setup (clockwise direction). Test Pattern A is transmitted to AI board which results in the Mia hand closing, generating touch and a feedback signal indicating the implant to now generate Data Pattern B. The Loop repeats, with the Mia hand now opening.
|
What’s next
In bench tests, the integrated system has successfully demonstrated closed-loop hand control, achieving latencies of under 100 ms for both readout and stimulation pathways. However, the B-CRATOS team aims at optimizing data transmission and reducing latency further, targeting a data rate of over 32 Mbps to support additional electrode channels and/or high sampling rates. These improvements will be informed by the knowledge gained from the current system integration tests and iterative improvements through further refinement and development.
Download as pdf




