B-CRATOS project overview
To better introduce our project, we decided to make a “map”.
You can click to open and close each circle to get an overview of the processes. They are described in more details in the page content.
")
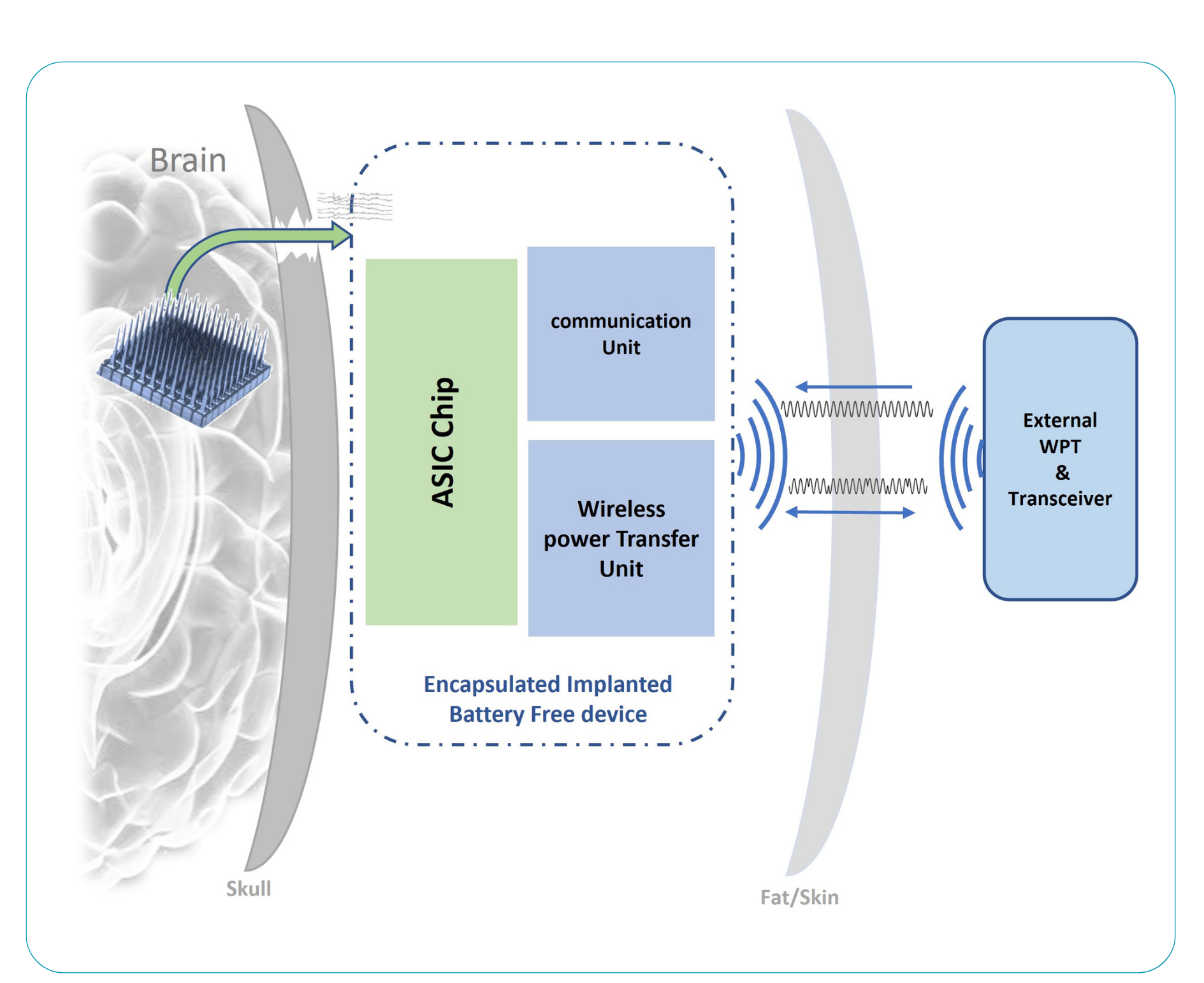
The implant electronics use a custom-designed ASIC chip to perform brain signal acquisition. Neural signals are converted to digital data for transmission and delivered to the communication unit. The communication unit uses a high data rate backscatter link for wireless brain neural readout and another two-way low data rate for stimulation commands and implant telemetry, which also performs the WPT function. The external unit reads brain data using the RF backscattering technique, sends AI Module-generated stimulation commands, and reads implant monitoring data using another transceiver wirelessly. The neural brain data is transferred to the AI Module through the FAT-IBC channel.
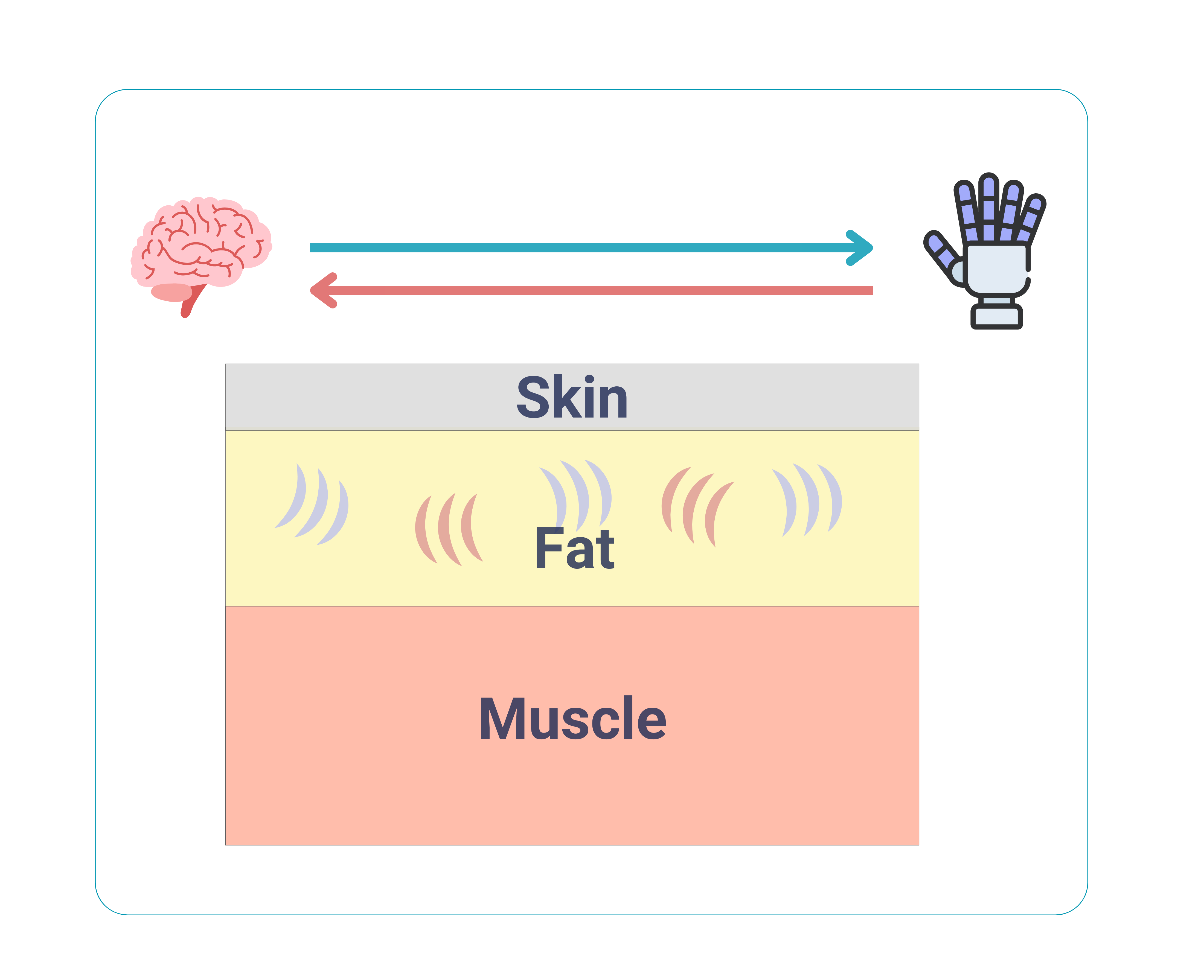
A fat IBC platform is Integrated to the neural interface and sensorized bionic limb. It is capable of safe high-speed, high-bandwidth data transmission through the adipose tissue layers (or “fat channel”) of the body. The Fat-IBC communication platform demonstrates real-time two-way transmission of recorded neural data and sensory stimulation signals between brain and machine.
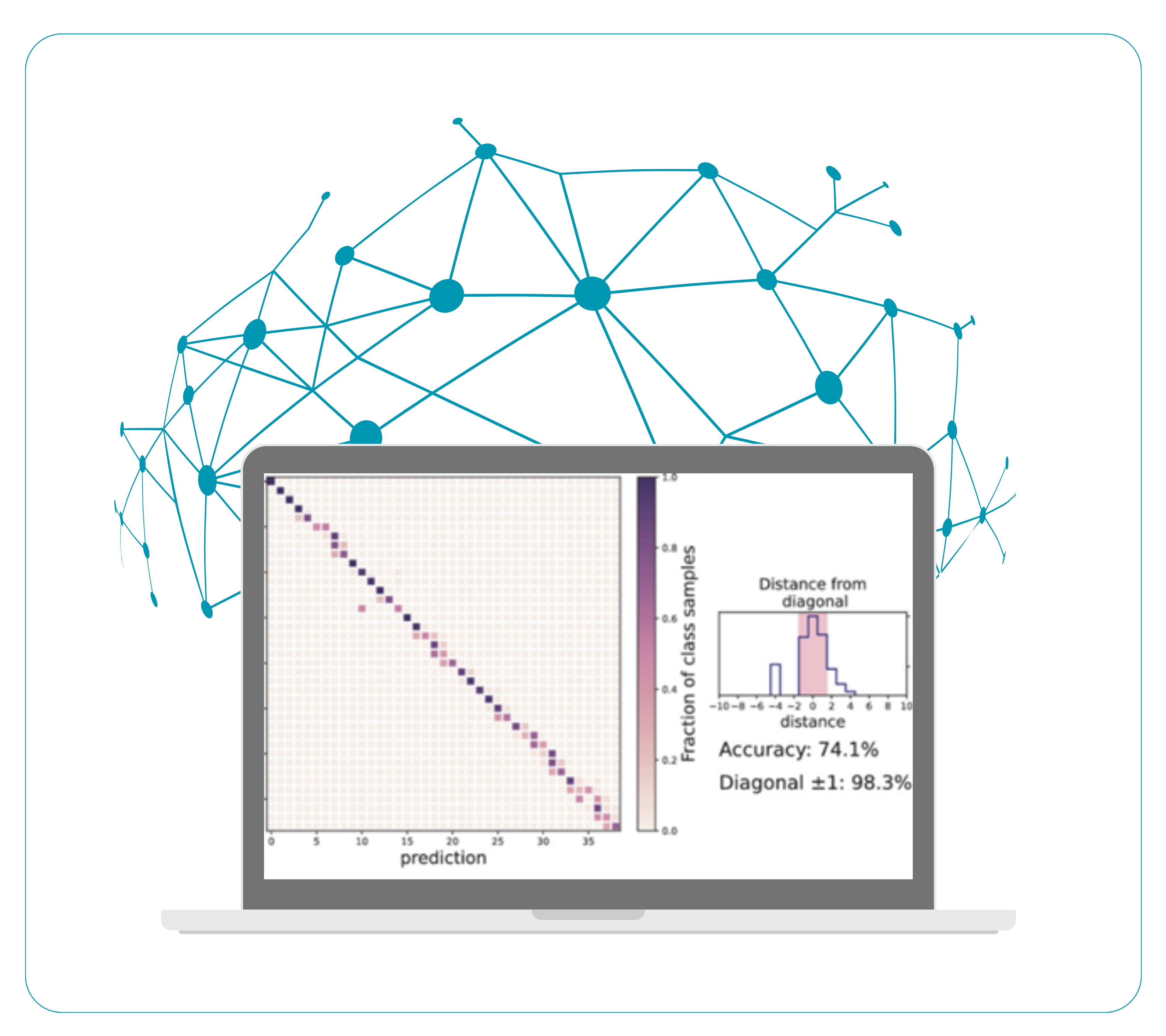
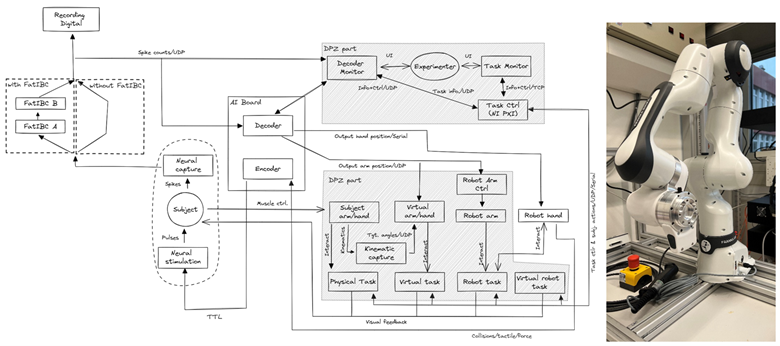
The AI module translates and relays signals between the brain and the prosthetic hand. It handles data in the two directions:
- Brain to hand (downstream): the stream of data coming from the implant in brain motor cortex is translated into commands for the MIA hand by a deep neural network model trained remotely on an HPC facility and continuously updated.
- Hand to brain (upstream): it encodes the signal of the artificial skin and hand, creating a perceptual model for closed-loop feedback to the sensory cortex stimulation implant
 Through careful experimental design, care, and training, NHPs are trained to control a robotic limb and to interpret sensory feedback in a movement task, generating critical data sets to inform the development of decoding models and identify key parameters for the in-body communications system. In real-time demonstration of the completed B-CRATOS platform, the NHPs achieves closed-loop control of the advanced prosthetic using the neural bypass bridge technologies.
Through careful experimental design, care, and training, NHPs are trained to control a robotic limb and to interpret sensory feedback in a movement task, generating critical data sets to inform the development of decoding models and identify key parameters for the in-body communications system. In real-time demonstration of the completed B-CRATOS platform, the NHPs achieves closed-loop control of the advanced prosthetic using the neural bypass bridge technologies.
One enabling technology of B-Cratos is represented by a human-like prosthetic hand endowed with an electronic skin (or “eSkin”). It is linked to edge computing devices leveraging machine learning/AI techniques for real-time decoding of neural signals into hand actions and touch feedback into meaningful brain stimulation commands. The hand used is the Mia model manufactured by Prensilia

")
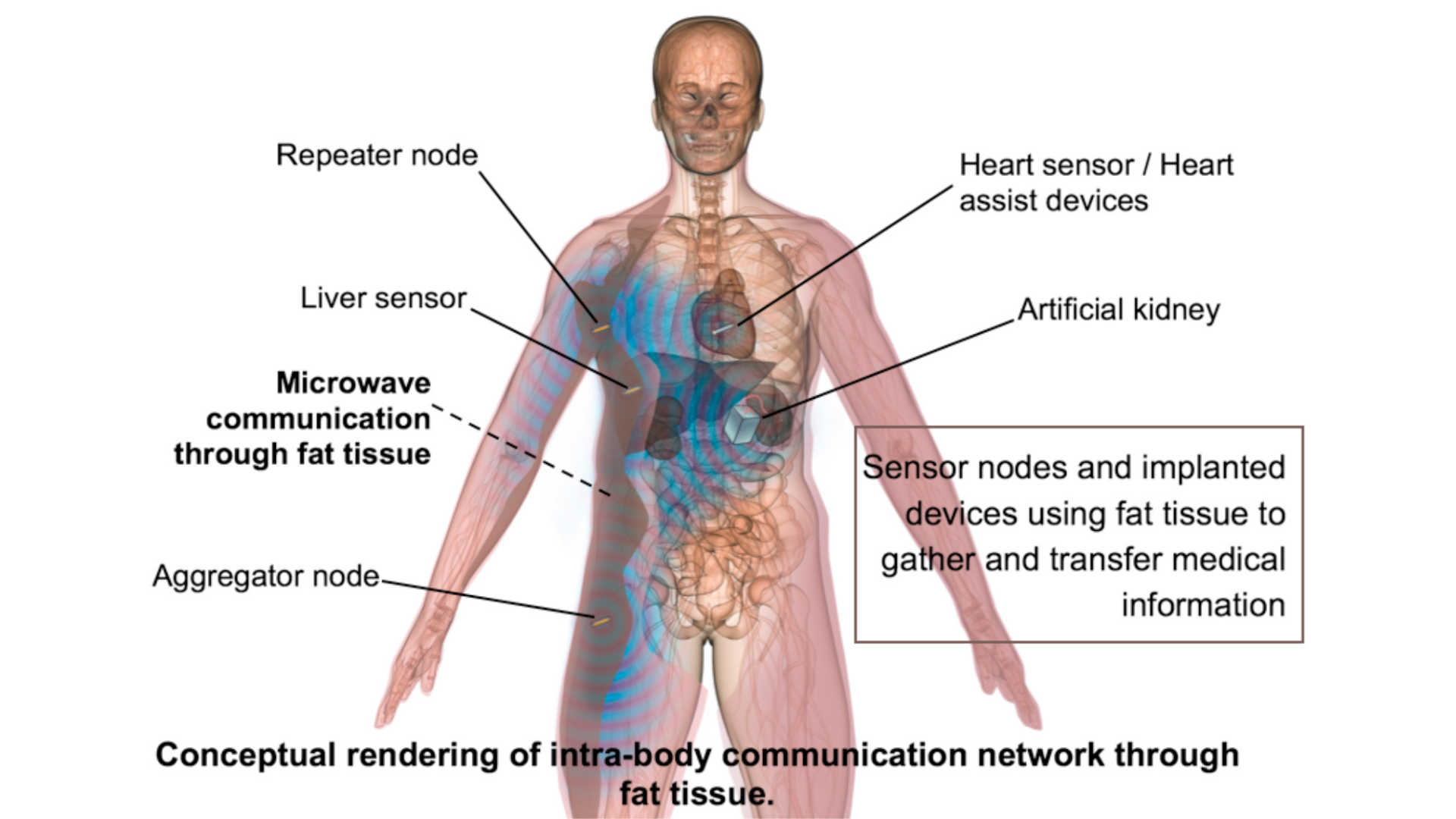
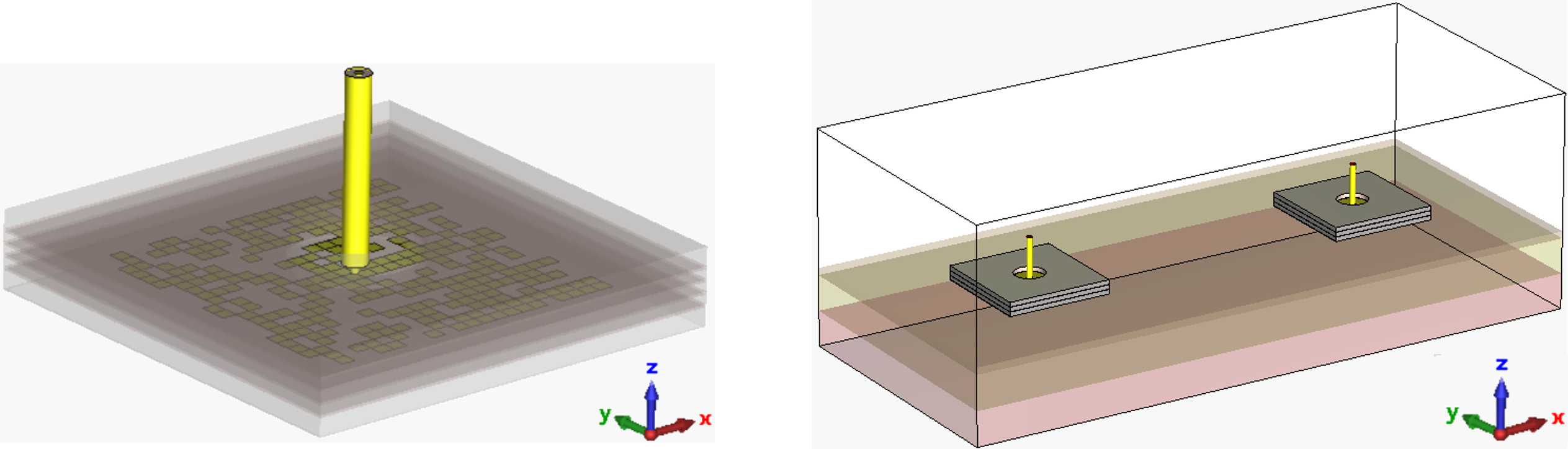
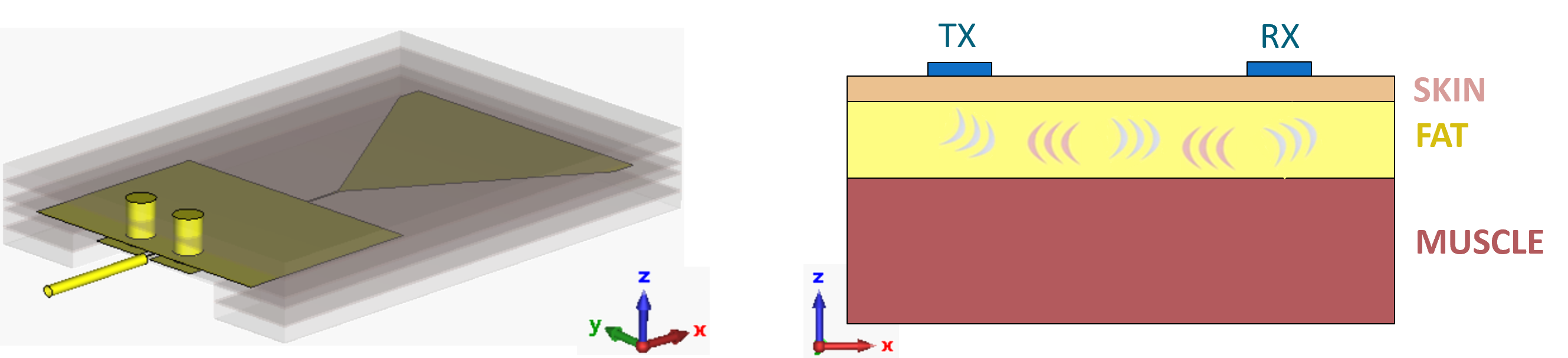 Figure 1 – Left: model of the monopole antenna; Right: visualization of the considered three-layer optimization setup.
Figure 1 – Left: model of the monopole antenna; Right: visualization of the considered three-layer optimization setup.